STM32平衡小车
多种扩展形态 可灵活搭配多种传感器
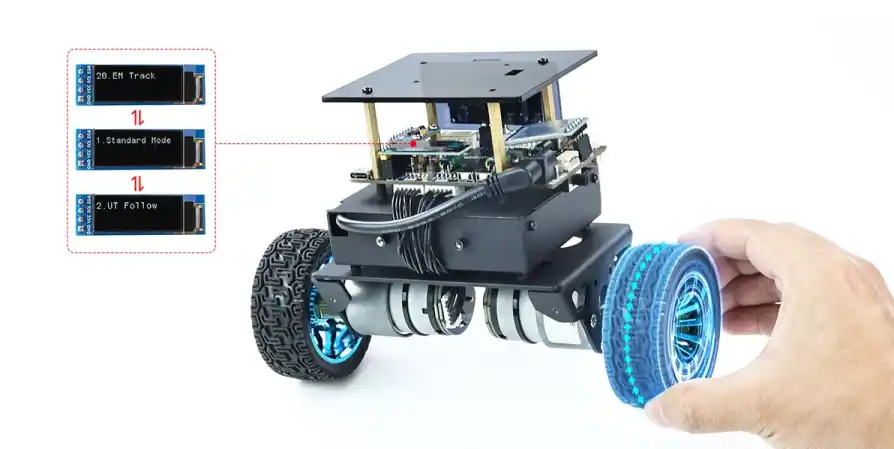
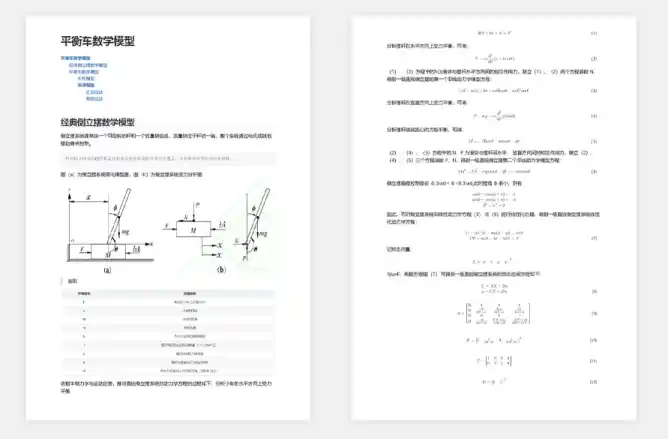
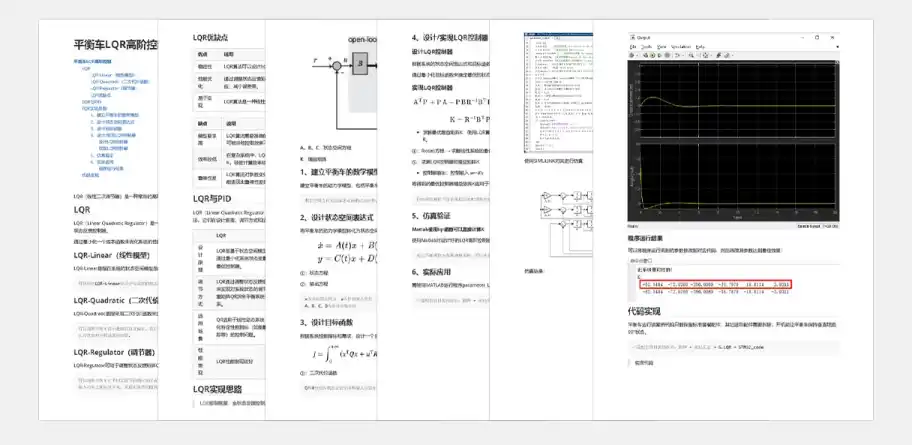
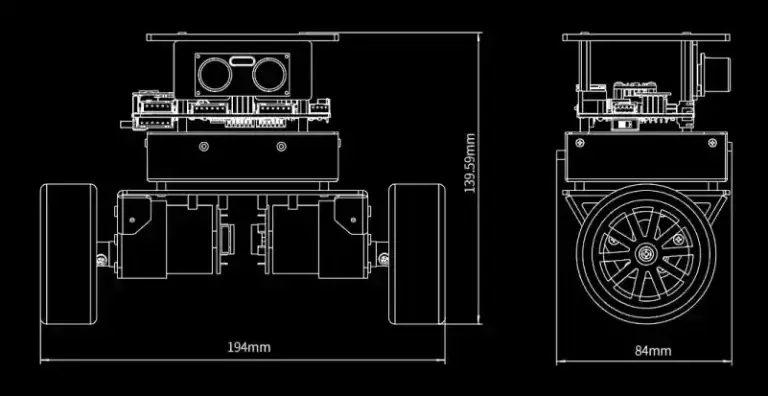
STM32平衡车集成了高性能STM32F103RCT6芯片,配备金属底盘、大功率减速电机和六轴IMU姿态传感器,不仅能够实现4公斤的负重平衡、轻松应对 爬坡挑战,还能通过超声波模块实现避障或跟随功能,OLED屏可实时显示数据,赠送手机遥控APP,支持实时查看数据波形,简化PID参数调试步骤。 平衡车还支持多种传感器扩展,如2.4G无线遥控、CCD摄像头巡线、高速电磁巡线,并可通过K210视觉模块实现图码控制、颜色跟随、颜色巡线等视觉 功能。此外,还支持雷达循墙边、雷达警卫、雷达巡逻、雷达避障、雷达跟随功能。内置PID控制教程及LQR控制源码与数学模型资料,助力用户快速 掌握平衡车控制技术。丰富的扩展接口满足不同层次用户需求,是学习与实践的理想平台。