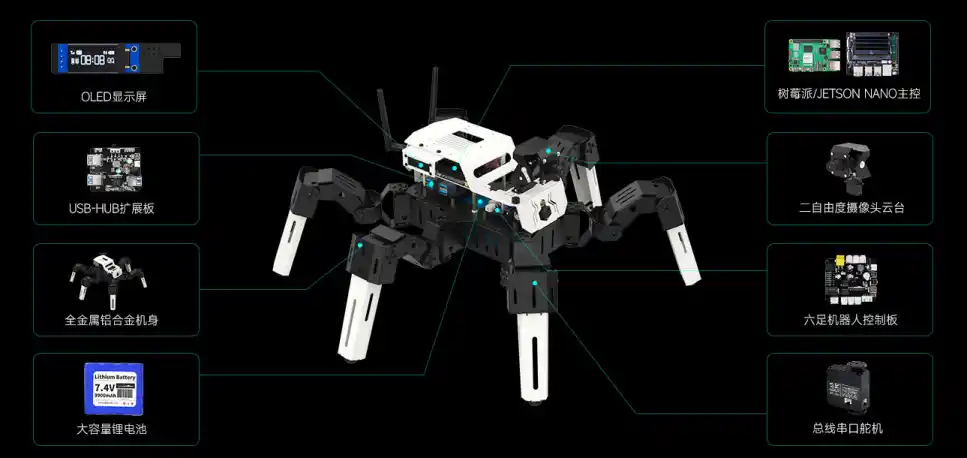
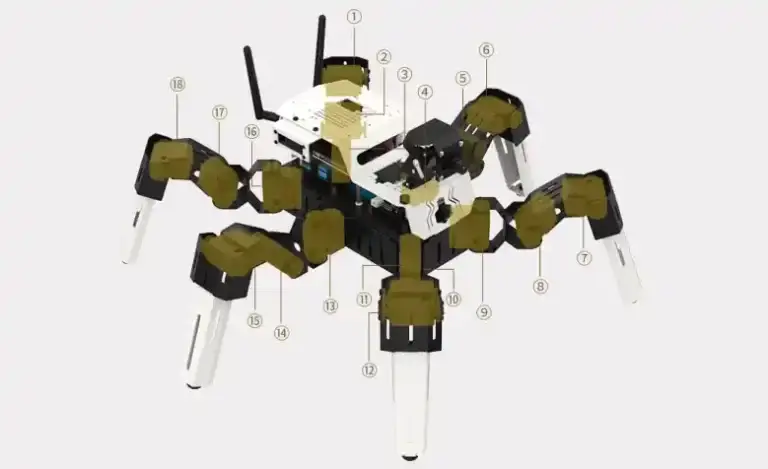
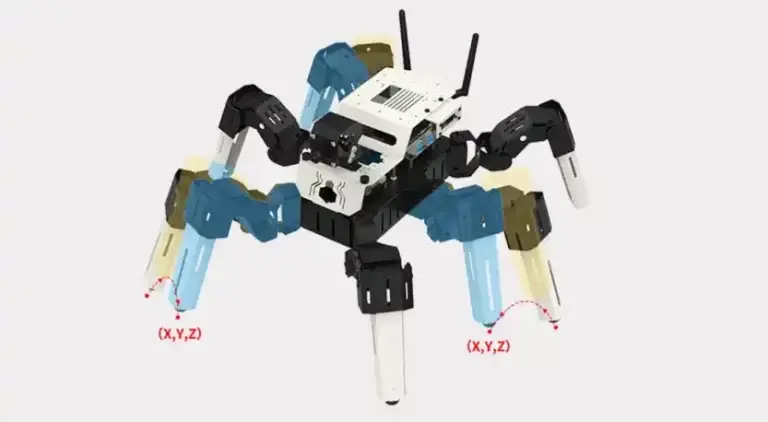
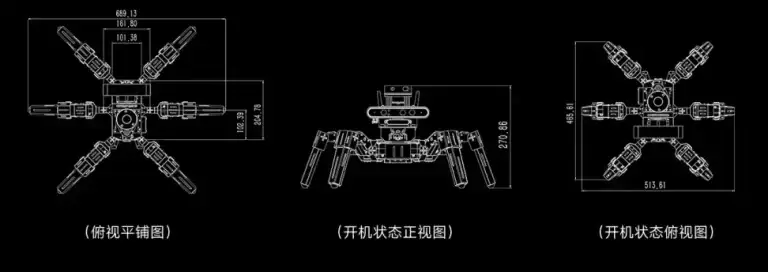
MUTO S2 AI视觉六足机器人18自由度关节 1 多种仿生步态 I 逆运动学算法 Muto六足机器人是一款18自由度的桌面级仿生六足机器人,可以完成伸懒腰、打招呼、害怕退缩、热身蹲起等多种仿真动作。多种配置可供选择, 支持无主控配置,可使用手柄进行遥控。还支持树莓派5或Jetson Nano主控,从而使Muto六足机器人具备更多扩展功能,例如APP遥控、颜色识别 追踪、跟随、人脸追踪、二维码识别、视觉巡线、示教器同步动作、物体检测、手势控制、身体动作控制等功能。 机械设计 科技美学 MUTO S2六足仿生机器人精心设计的机械结构,采用硬朗线条勾勒出力道十足的轮廓,演绎着科技 与美学的完美融合。搭配高性能主控,二自由度摄像头云台,内外兼修,可实现AI视觉识别、追踪 等深度学习。 18自由度运动关节 Muto采用了18个高性能伺服舵机和铝合金结构件,用于固定连接机器人的每条腿上的三个关节,以真实还原六足动物的运动姿态。 逆运动学算法精控 Muto六足机器人内置逆运动学算法,精准控制机器人运动。Muto六足机器人自身建立空间坐标系,通过轨迹规划足端运动路线,逆运动学算法结合三角步态行走原理,使Muto六足机器人运动更加平稳协调。 仿生动作拟态 精心设计的多个动作组,尽收纳在遥控APP中,一健即可命令Mut。实现拟态动作。不仅如此,用户也可以掰动其关节调整到想要的目标姿态,让它学习记忆当前姿态,自定义编排更多萌趣动作组。 支持示教模式 Muto六足机器人支持示教模式,通过手动控制主机单腿动作,另外一台从机执行相同动作。 姿态叠加 运动灵活 支持行走速度、机器人身体高度自由调节。 激光雷达功能玩法 畅玩遥控APPMUTO S2专业版六足机器人支持手机APP遥控,可以通过手机APP控制机器人运动方向,支持表演模式、全屏控制、数据监测、机器人校准、动作表演等功能。上位机遥控S2专业版六足机器人可通过JupyterLab网页生成上位机控件,控制六足机器人运动和各种表演动作。无线手柄控制MUTO S1基础版标配使用2.4G无线手柄控制六足机器人运动,MUTOS2专业版标配USB无线手柄控制六足机器人动作。 规格参数