MUTO RS AI视觉ROS六足机器人
激光雷达SLAM感知避障 I 深度相机AI视觉识别
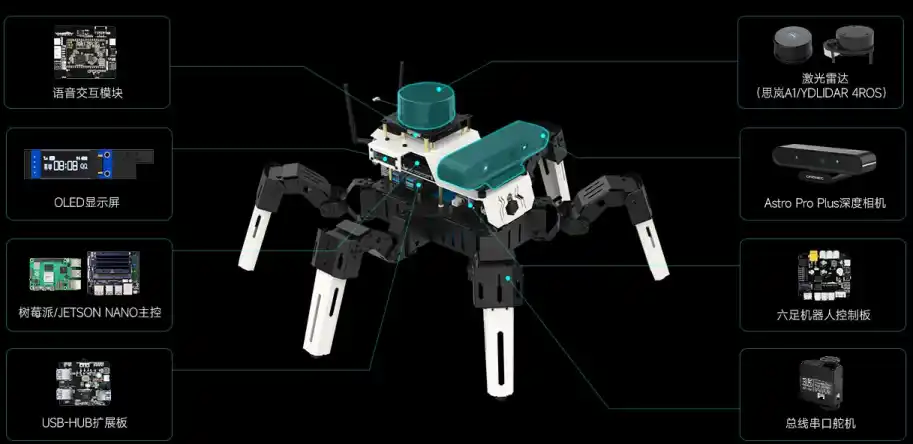
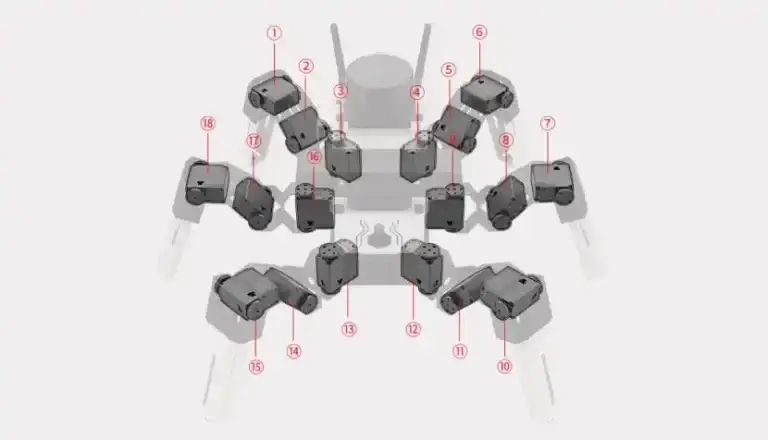
Muto RS是一款基于ROS2操作系统的18自由度仿生六足机器人,支持Jetson Nano和树莓派两款主控。机体搭载了智能总线舵机、激光雷达、深度相 机、语音交互模块等高性能硬件配置,可实现机器人运动控制、AI视觉互动、建图导航、docker容器开发、深度视觉追踪、雷达追踪避障、三维建图 导航、语音交互等应用。不仅适用于六足运动学习和验证,还为ROS开发提供便捷的集成解决方案。Muto RS配套ROS课程,并涵盖海量教学课程文 档,助您快速玩转ROS六足机器人。