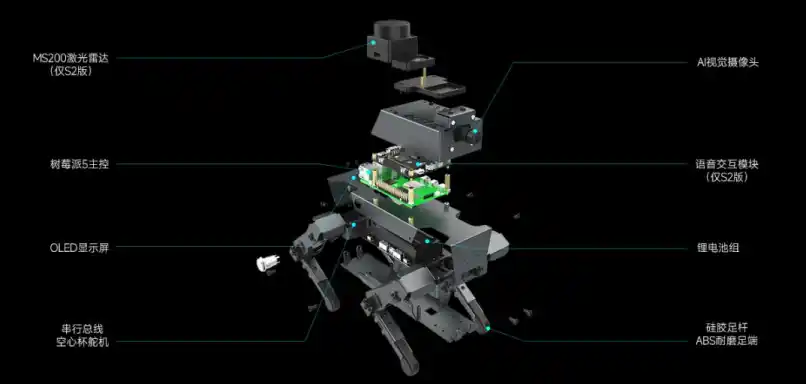
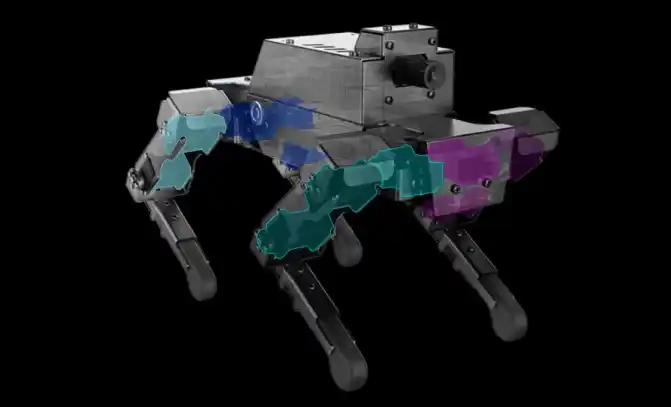
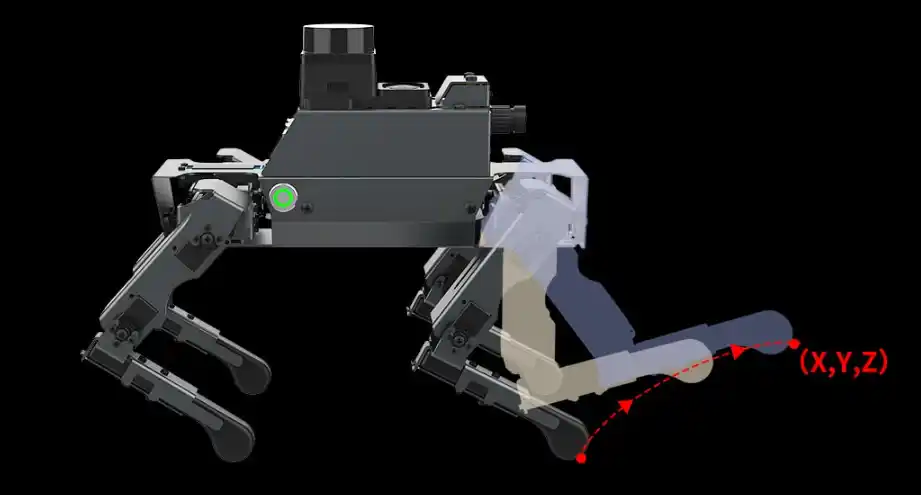
DOGZILLA四足机器狗12自由度“雷达建图”AI视觉交互|语音交互 DOGZILLA是一款12自由度的桌面级AI机器狗,内部搭载了IMU和关节位置传感器,能够反馈自身姿态和关节转角与力矩。底层协处理器结合逆运动学算法,支持多种运动步态和叠加效果。主处理器采用树莓派5,支持Python编程,全新升级ROS2操作系统,提供机器视觉、机器人运动学、步态控制、雷 达建图导航、语音控制等算法支持。提供丰富的学习资料,助您快速玩转AI四足机器狗。 机械设计科技美学 DOGZILLA整体结构采用仿生学设计,它的机身采用铝合金材质,并搭载12个高性能空心杯机,动作灵活丰富,可以轻松实现自由行走、上下台阶等基本步态。机器人的头部配备了高清广角摄像头,拥有第一视觉,能实现更多有趣的A玩法,如目标追踪、人脸检测、视觉巡航、自主攀爬、达建图等。 串口总线舵机DOGZILLA的模块化同服关节由直流空心杯电机、减速齿轮组、滚珠轴承、12位磁编码器和集成控制电路组成,采用了大速比、高效率的减速器,在保证了柔顺性的同时,提高了负载自重比。激光雷达专业版S2搭载了高性能TOF激光雷达,通过全方位激光扫描可实时构建地图,精准感知周围障碍物,实现动态避障、警卫、巡逻、跟随等功能。语音交互模块内置科大讯飞定制语音识别算法和发音人声,可让四足机器狗具有“能听能答”的特点,支持语音指令控制DOGZILLA移动和玩法互动。AI视觉摄像头摄像头支持120PFS帧率,120°广视角,拥有2MP像素,呈像画面清晰,适合做AI视觉识别、自动驾驶项目。 搭载树派5主控 DOGZILLA拥有树莓派5强劲性能支持,A算力大幅度提升,性能是树莓派4B的2~3倍。 12自由度运动关节 DOGZILLA搭载12个高性能同服机,铝合金结构件进行固定联接作为每条腿上的时、肩、三个关节,真实还原四足动物的运动姿态。 逆运动学算法 用户只需通过上位机对机器狗每条腿的坐标系输入标位置坐标值,机器狗便通过逆运动学算法计算出每个关节角和生成运动轮廊,从而能精准地将机器狗足末端从初始位置移动到目标位置。 仿生动作拟态 精心设计的20个动作组,尽收纳在遥控APP中,一键即可命令DOGZILLA实现拟态动作。不仅如此用户也可以班动其关节调整到想要的目标姿态,让它学习记忆当前姿态,自定义编排更多萌趣动作组。 多姿态运动叠加 多种运动步态和运动叠加,移动+姿态就是可以带着姿态移动。一边走一边调节高度和倾斜度,一边走一边转弯,可以任意组合调节。 语音交互 功能玩法 规格参数