DOFBOT-PRO 3D深度视觉机械臂
三维空间立体抓取|3D深度点云识别 智能语音识别交互|AI视觉识别交互
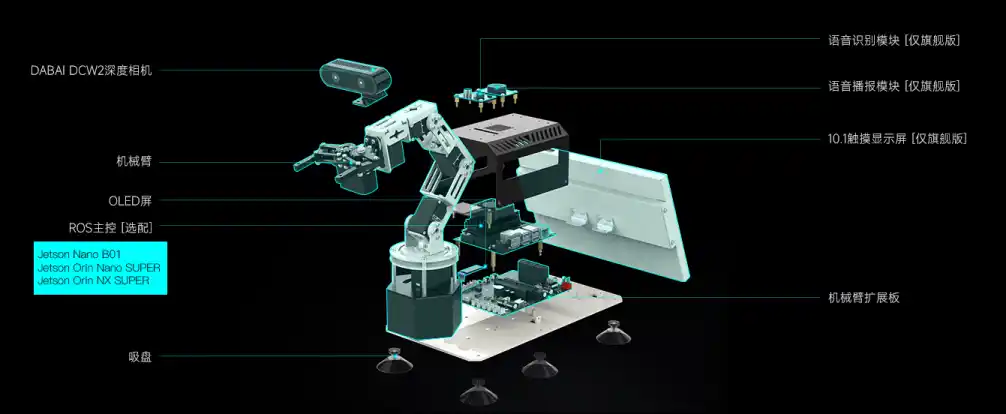
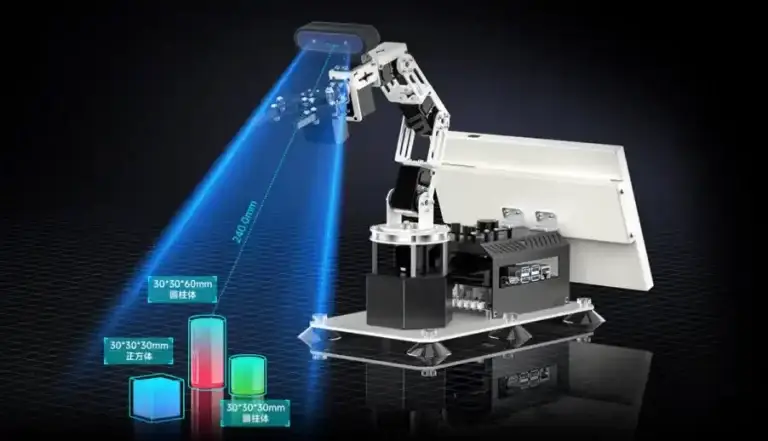
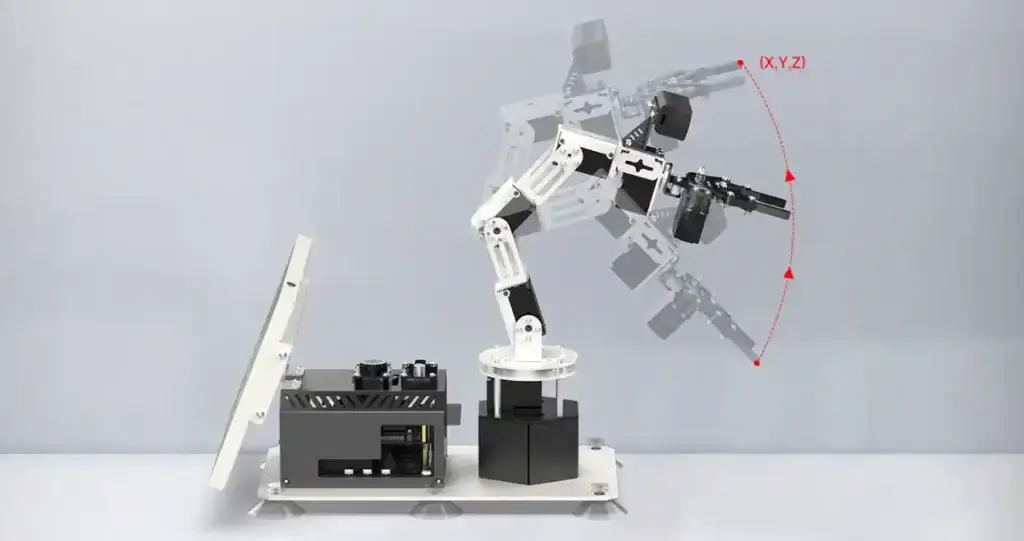
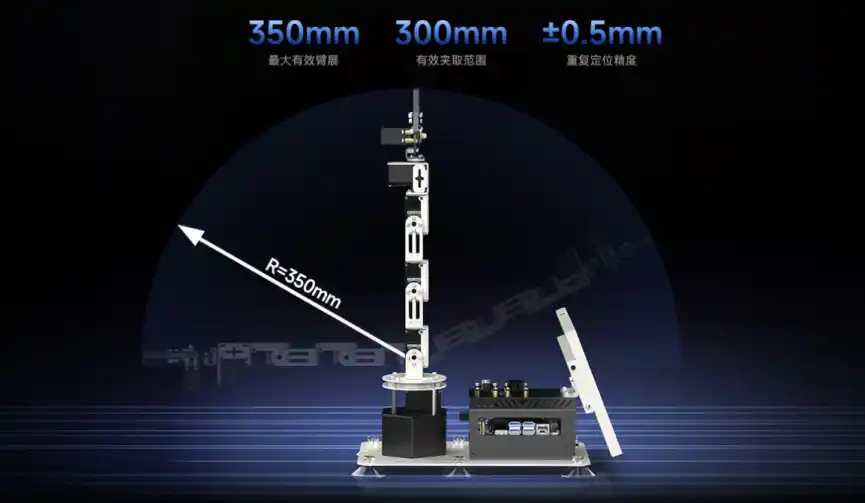
POFBOT-PRO是亚博智能科技面向ROS教育场景开发的桌面级三维AI视觉机械臂,它搭载了3D深度相机、6自由度运动关节、NVIDIA Jetson主控、10.1寸触摸屏、语音模块等高性能硬件。将30 •觉技术与机械臂控制相结合,不仅可以实现深度距离测量、形状识别、高度测量、体积测算,还能通过机械臂在三维空间内识别、追踪、抓取目标物品。通过Jetson主板的GPU,进行机器学 模型训练,DOFBOT-PRO可以实现垃圾、颜色、物品、人脸等多种图像识别任务,通过Python编程,还可以拓展语音交互等各种AI创意项目。通过集成ROS机器人操作系统和正/逆运动学算法, 简化了6自由度机械臂复杂的运动控制。配套专业的ROS课程,涵盖海量技术资料、功能源码,课程文档,为ROS教育与研究提供了强大而灵活的平台。