ROSMASTER R2 阿克曼ROS小车
ROS深度开发 I SLAM建图导航 1 全面支持ROS
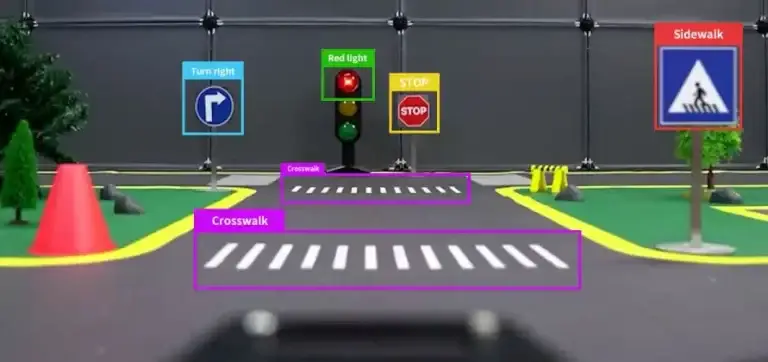
| ROSMASTER R2是一款基于ROS机器人操作系统开发的阿克曼转向结构的移动小车(已全面适配ROS2系统),它支持Jetson系列主板和树莓派5作为主 控,满足对应主板的供电需求,并搭载了激光雷达、深度相机、语音交互模块等高性能硬件配置,可实现机器人运动控制、遥控通讯、建图导航、跟 随避障、自动驾驶、人体特征动作识别、语音交互控制等应用;ROSMASTER配套212节ROS课程,提供教学课程文档和中英文字幕讲解视频,手把手 教您入门ROS,玩转ROS机器人应用。